365be体育app官网疏浚团队魏长赟副教授在疏浚船舶的自主无人控制研究领域取得一系列进展。
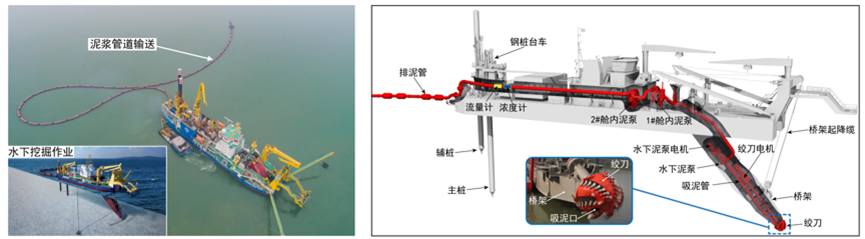
绞吸挖泥船是港口航道建设的国之重器。目前绞吸船的挖掘-输送过程控制严重依赖驾驶员的经验和手动操作,面临的难题包括,挖掘-输送过程工序冗繁、劳动强度大,夜间长时间手动操作容易驾驶疲劳,时常引发安全事故;手动操作的经验依赖性强,驾驶员操作水平良莠不齐,优秀驾驶员的操作经验难以积累和传承;海上作业远离陆地,施工环境恶劣,安全风险高,企业招工日益困难;海上绞吸船装机功率通常可达上万千瓦,其挖掘-输送过程的能耗占比超 90%,手动操作难以充分发掘设备效能,导致产量低、能耗高。
针对挖掘作业过程的自主控制,提出了基于数据驱动的离线强化学习控制方法,利用人工手动操作的多源异构时序数据,采用栈式降噪自编码器进行数据清洗,建立基于卷积网络的状态转移预测模型,进而实现多任务场景下最优操控策略的学习控制(Wei et al.,2023)。
针对挖掘作业过程的自学习控制,由于常规的强化学习控制方法需要几十万甚至上百万次的试错学习,训练时间长,无法直接应用于工程装备的学习控制。对此,建立基于挖掘作业性能的优先级采样策略,提出映射共有特征空间的专家操作经验融合方法(Wei et al.,2022)。
针对绞吸船长距离管道输送粗大颗粒时容易发生堵管的难题,提出基于模型预测控制的泥沙输送管道流速稳定控制方法,建立了绞吸船管道输送系统的动力学模型和约束条件,通过阶跃响应实验和稳定流速实验验证了所提出方法在泥沙管道输送时的抗干扰能力(Wei et al.,2021)。
魏长赟副教授以“疏浚船舶的自主无人控制”为主题,在国际权威SCI期刊《Engineering Applications of Artificial Intelligence》和《Ocean Engineering》上连续发表3篇第一作者论文,论文主要合作者是英国卡迪夫大学自主无人系统实验室主任Ze Ji教授。
以上研究工作得到了国家自然科学基金(61703138)、常州市国际科技合作(CZ20210027)等项目支持。
论文信息:
1. Changyun Wei(魏长赟), Hao Wang, Haonan Bai, Ze Ji* and Zenghui Liu. PPLC: Data-driven offline learning approach for excavating control of cutter suction dredgers. Engineering Applications of Artificial Intelligence, 2023, 125: 106708.
2. Changyun Wei(魏长赟), Haonan Bai, Yi Wei, Ze Ji* and Zenghui Liu. Learning manipulation skills with demonstrations for the swing process control of dredgers. Ocean Engineering, 2022, 246: 110545.
3. Changyun Wei(魏长赟), Yi Wei and Ze Ji*. Model predictive control for slurry pipeline transportation of a cutter suction dredger. Ocean Engineering, 2021, 227: 108893.
(图文:魏长赟 审核:白建波)